HARPの始め方
(人間型高度ロボットプラットフォーム)
この記事では、HARPの基本操作と設定方法について説明します。この記事を読み終える頃には、システムに接続されたロボットを遠隔操作できるようになります。
始める前に
Inverse 3 VerseGrip スタイラスのセットアップをまだ行っていない場合は、「 Inverse3の使い始め」および「VerseGrip スタイラスの使い始め」のガイドをご覧ください。
HARPのインストール
HARPダウンロードしたら、インストーラーを実行してください。手順は簡単で、完了するとアプリケーションが起動します。
TODO -harp を追加する
ライセンスの有効性確認
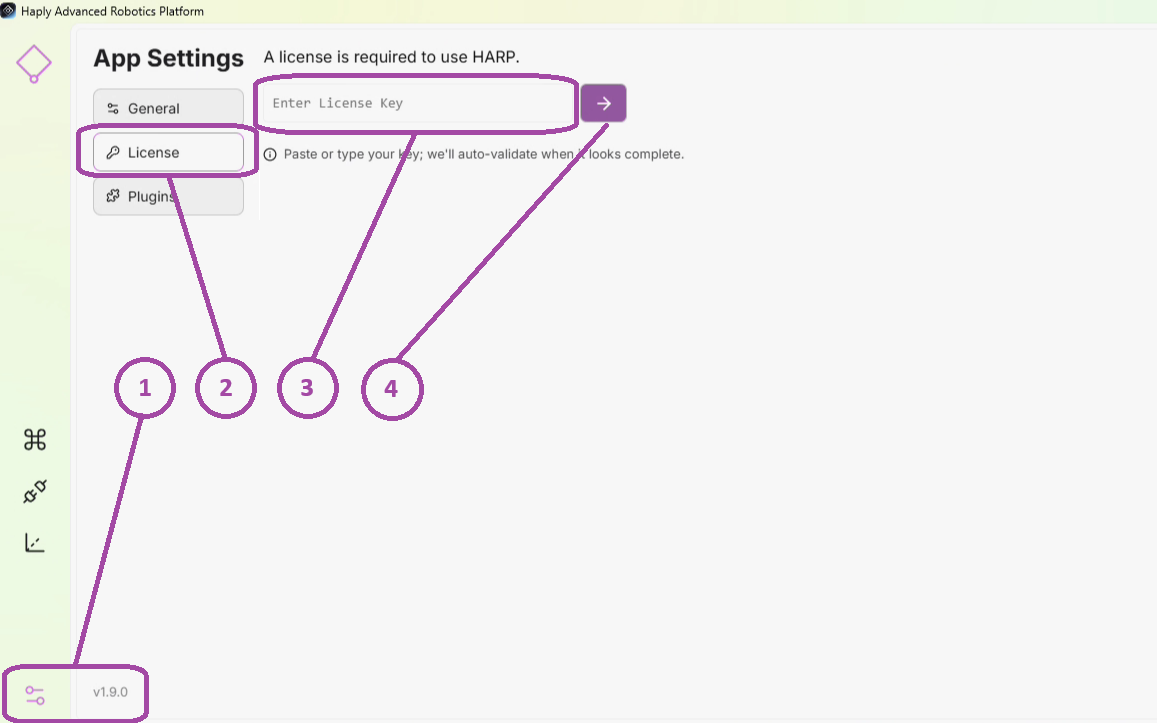
HARP 、(1) 設定画面を開き、(2) 「ライセンス」メニューを選択します。(3) ライセンスキーを入力し、(4) クリックしてライセンスを有効化してください。
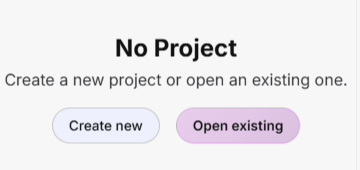
プロジェクトを作成する
まず、新しいプロジェクトを作成します。プロジェクトに名前を付け、プロジェクトを配置するディレクトリを選択します。
接続機器
リーダー端末
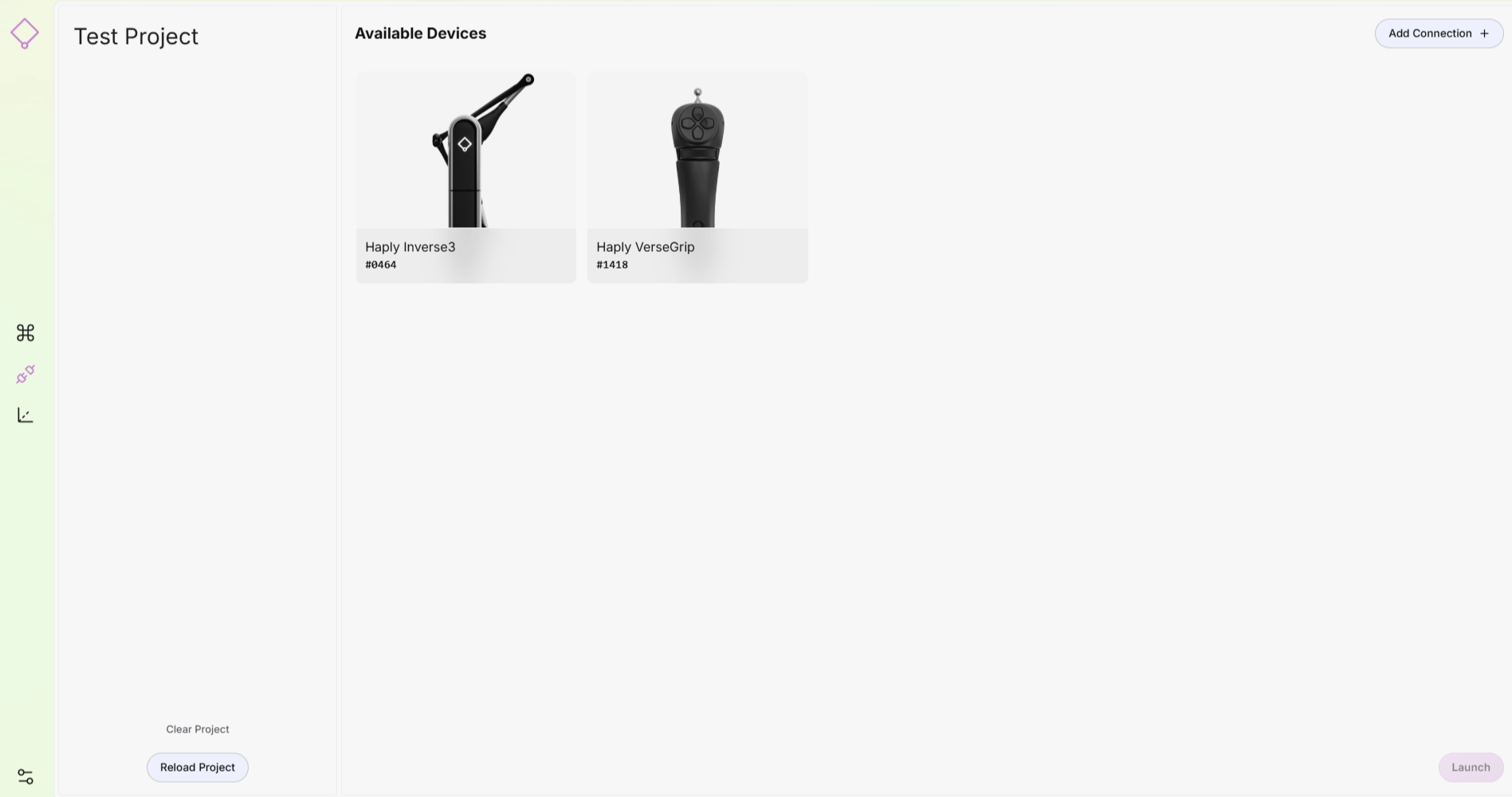
リーダーデバイスが接続されていることを確認してください。画面に「Inverse 3 」Inverse 3 「VerseGrip」が表示されているはずです。いずれかのデバイスが表示されない場合は、電源を確認し、VerseGrip用のUSBドングルがPCに接続されていることを確認してください。
接続端末
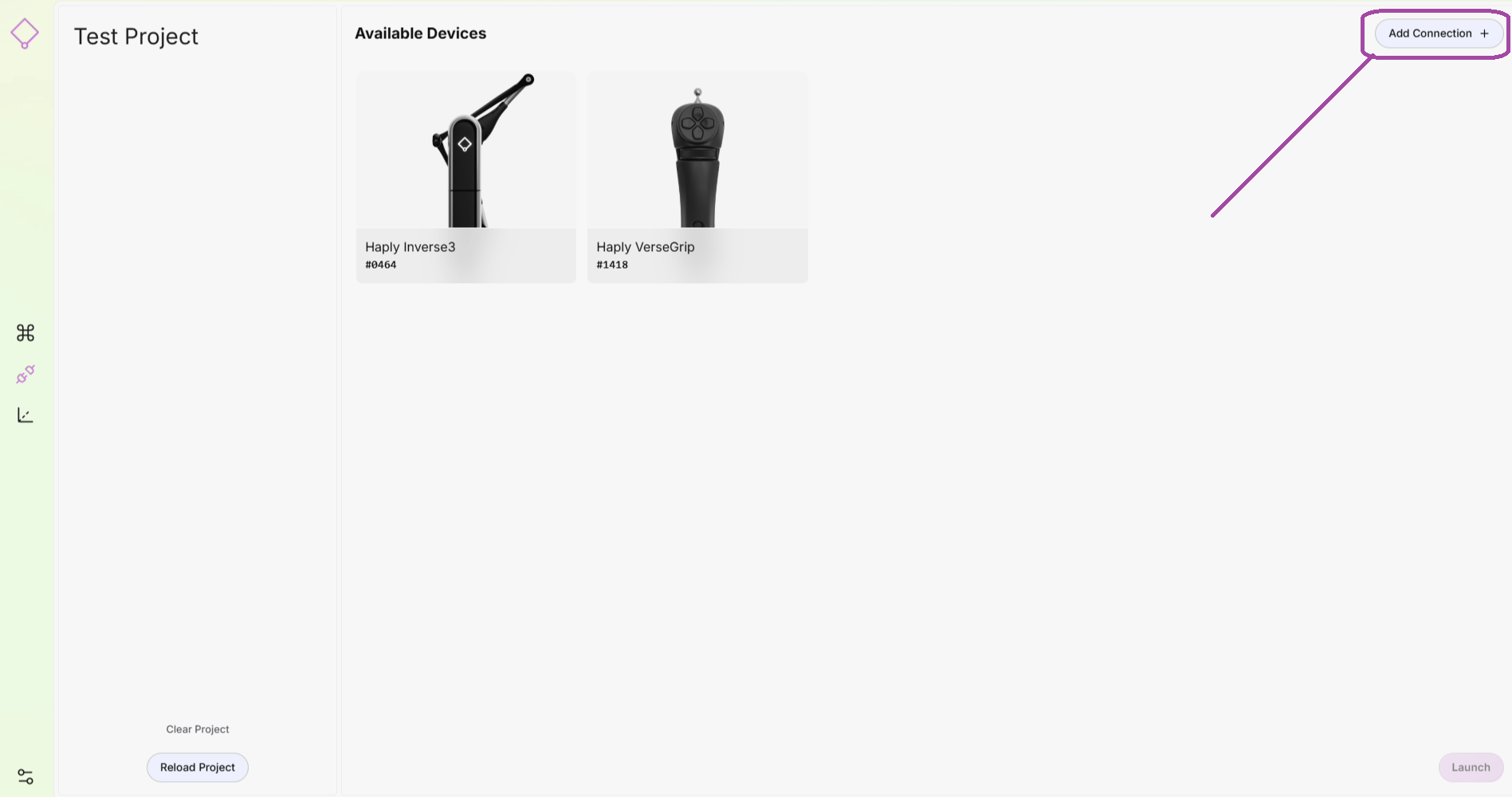
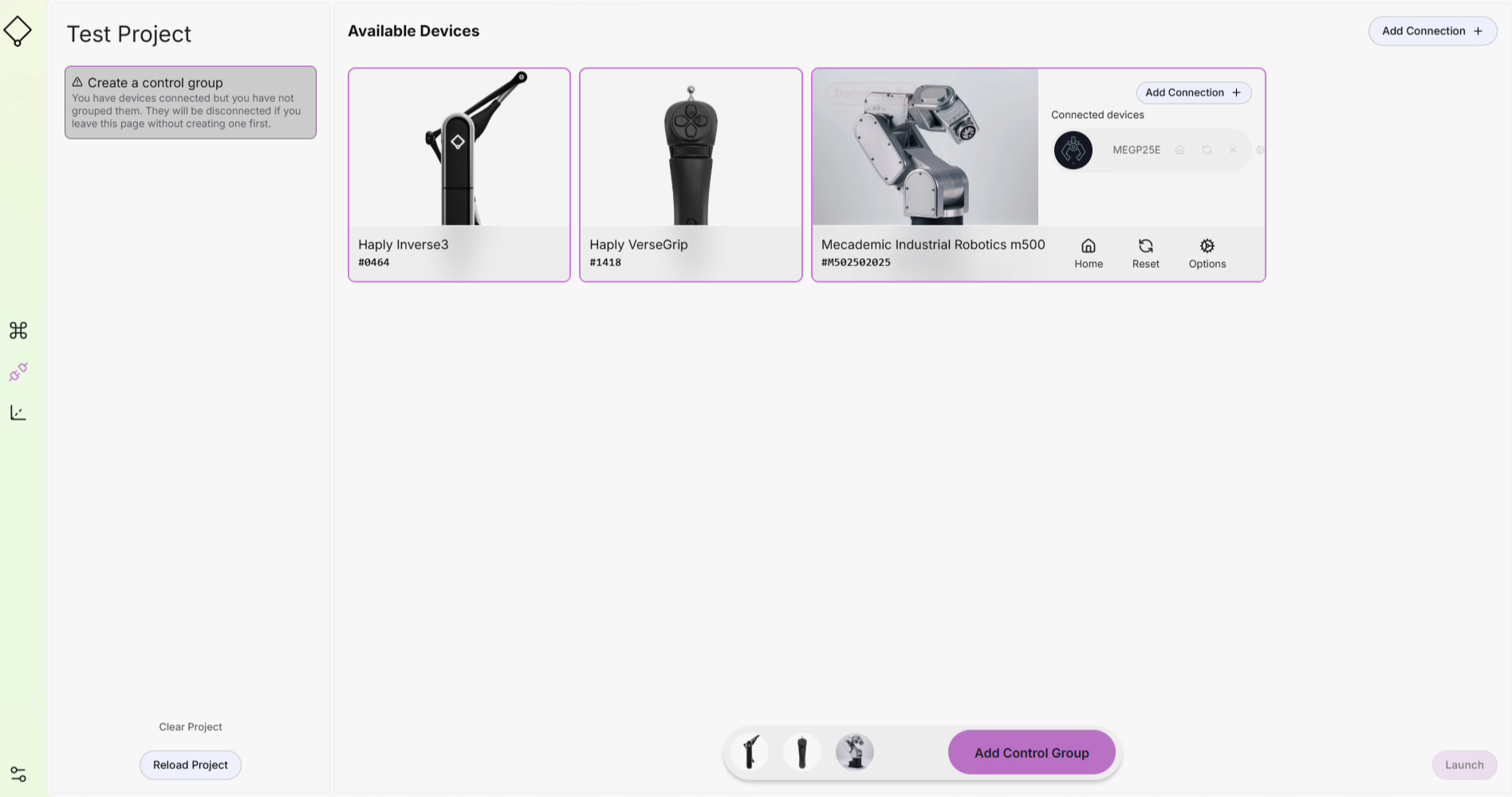
フォロワーデバイスを接続するには、「接続を追加」機能を使用して、ロボット、力・トルクセンサー、エンドエフェクタに接続できます。
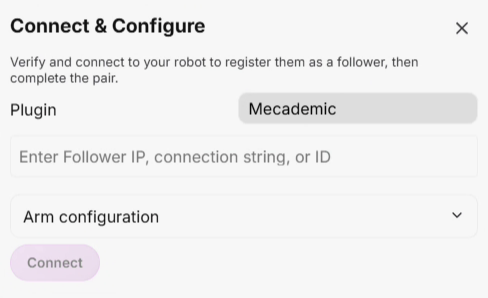
まずロボットアームから選択し、ドロップダウンリストからロボットを選択して、接続文字列を入力してください。接続ボタンを押してください
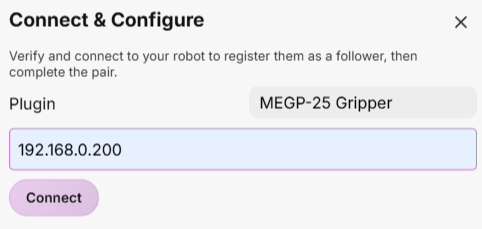
グリッパーを追加し、接続されたロボットのタイルにある「接続を追加」をクリックします。
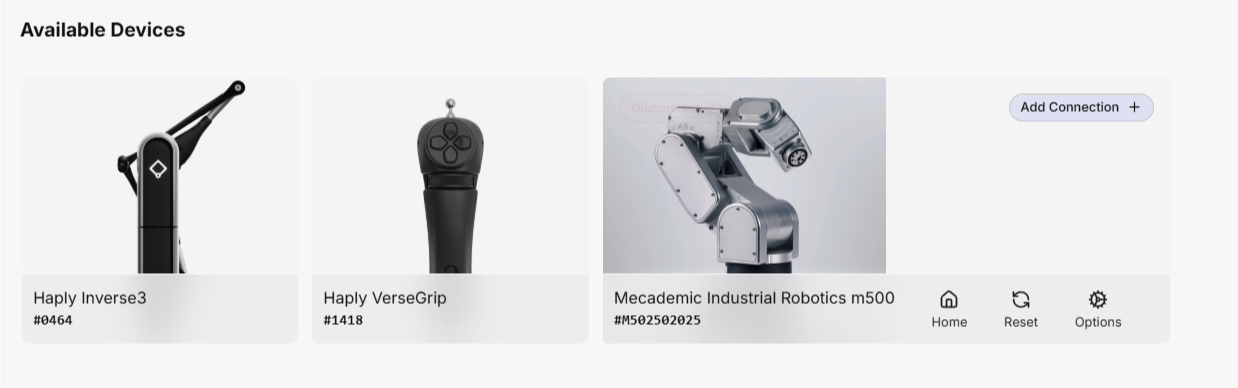
ドロップダウンメニューからエンドエフェクタを選択し、接続文字列を入力してください。「接続」をクリックしてください。
デバイスの電源が入り、接続も完了したので、コントロールグループを作成しましょう。コントロールグループに含めたいデバイスのタイルをそれぞれクリックします。選択すると、それらが画面の下部に集まります。選択が完了したら、「コントロールグループに追加」ボタンを押してください。
左側のプロジェクトペインにコントロールグループが表示されます。
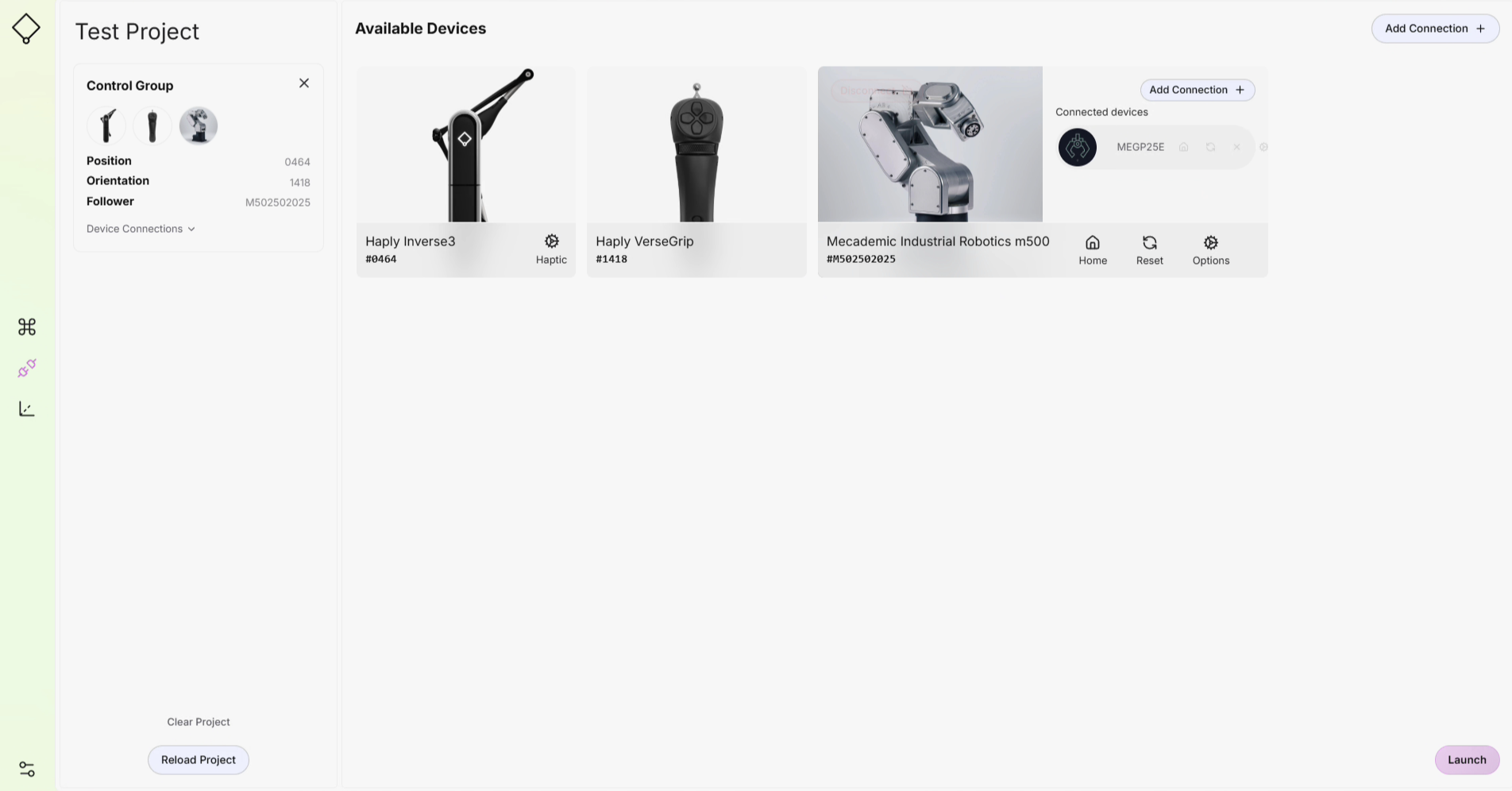
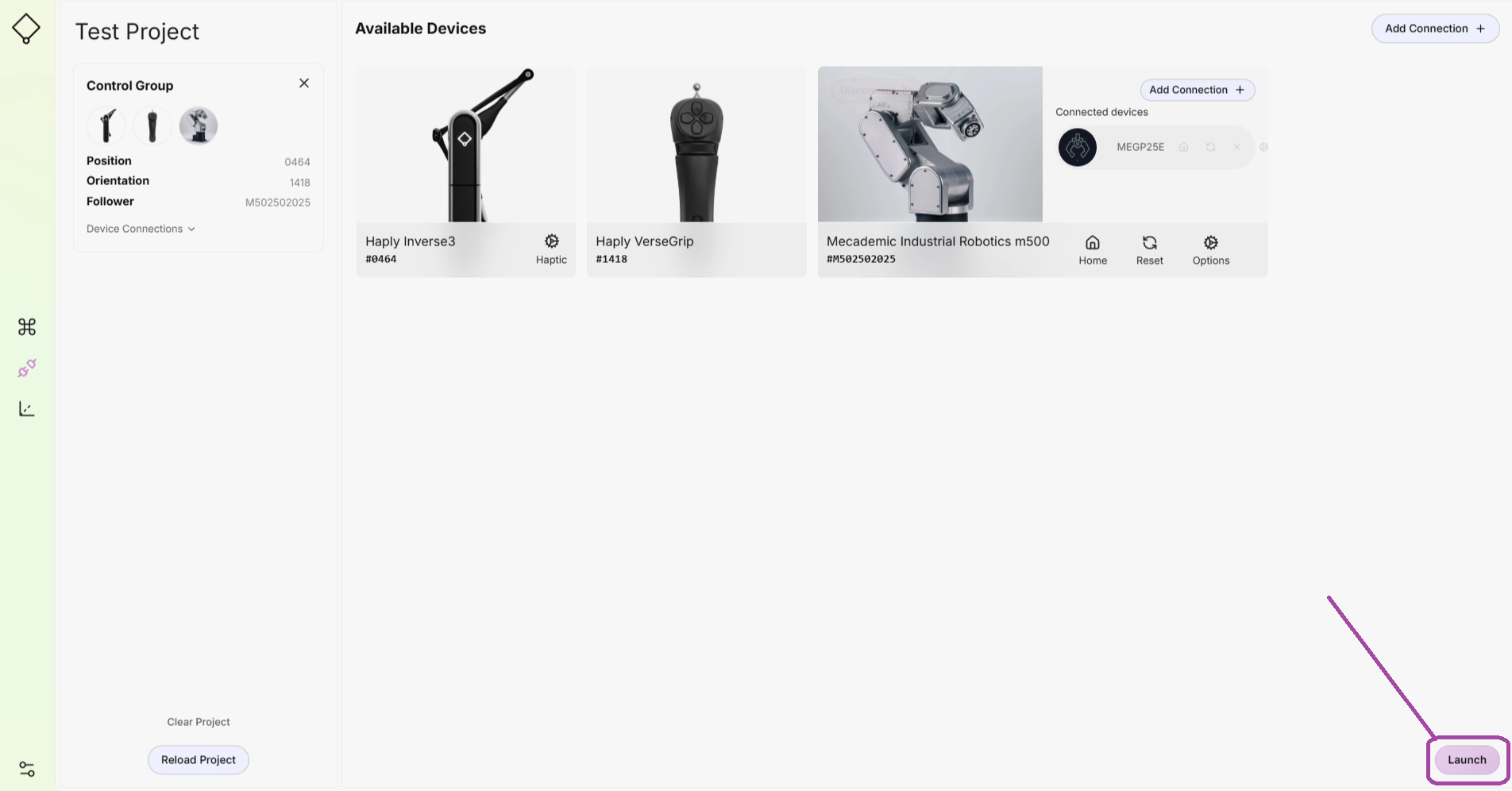
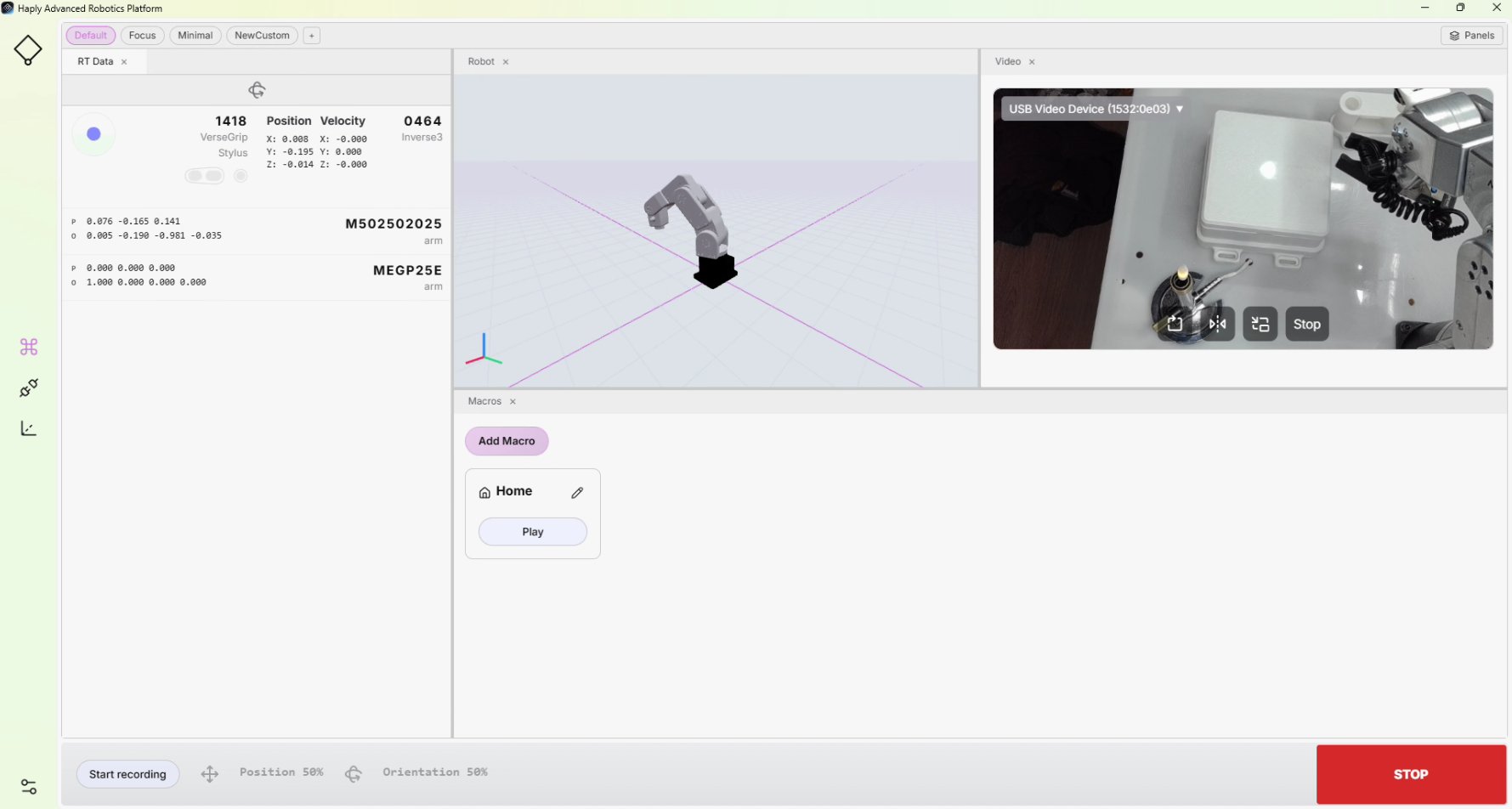
すべての接続が完了しました。「起動」ボタンを押して、ロボットを操作できるコントロール画面へ移動してください
遠隔操作
現時点では、制限も境界も設定されていません。本格的な制御作業に取り掛かる前に、安全を確保し、慎重に進め、システムの仕組みを理解してください。
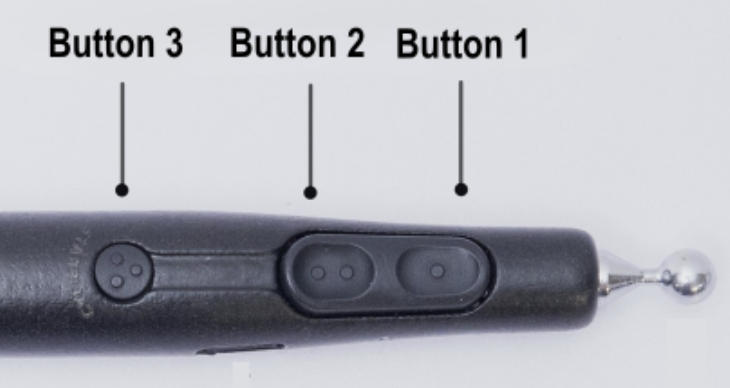
「STOP」ボタン(右下)を押すと、RESETボタンを押すまでロボットの動作を停止できます。(ESCキーでもロボットを停止できます)
VerseGripでは、ボタン1がクラッチとして機能します。
- クラッチが押されていない — ロボットが動かない状態で、デバイスを自由に動かすことができます。
- クラッチ圧着 —Inverse 3 がInverse 3 につれてロボットも動く。